








株式会社スマートロボティクス / エンジニア
オールインワンアクチュエータ
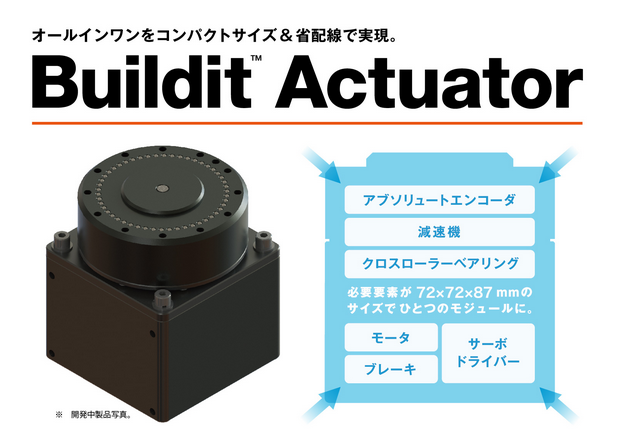
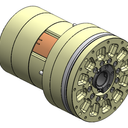
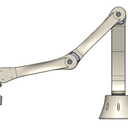
ロボットを簡単に構成する為に製作したアクチュエータです。 アクチュエータ内部は、減速機・ブレーキ・モーター・制御回路・クロスローラーベアリングにより構成されています。 制御端末とは、電源、USB(RS485)のみ接続する事で、Pythonから制御可能になっています。
Business social network with 4M professionals
オムロン株式会社 / 技術・知財本部 ロボティクスR&Dセンタ ロボティクス技術統括部 主査
【スキル範囲】 学歴・職歴的にはソフト寄りですが、2016年にスマートロボティクスを立ち上げた際、学生時代から一番相性の良かったメカエンジニアにトライ。今ではメカをメインとし、試作設計~評価を主に担当させて頂く頻度が高いです。
ロボット:基本的に特定の分野に拘りは無く、ロボットで解決する事が望ましいと考えられる課題に対しての解決手法を考える事が好きです。その為、ロボットに関わるものであれば、大体何でもやってみたいです。
ロボットのR&D部門にて杉原知道さんと共に、拠点立ち上げからロボットのシステム設計及びメカ・エレキ・組み込みソフト周りの設計・評価・試作・安全設計・協力会社様調整といった、制御シミュレータ以外の全般を担当しております。
株式会社メルティンでは、アバターロボットチームの機械設計エンジニアとしてお仕事をさせて頂きました。
スマートロボティクスでは、創業メンバーとしてジョインし、ハードウェア設計をメインに、主に自社製品開発を担当しておりました。
View Kiyomasa Kawagoe's
Full Profile
This information is visible only to Wantedly users or the user’s connections
View past posts
View mutual connections
View Kiyomasa Kawagoe's full profile
CAD(SolidWorks)
Recommended by 晃平 濱本, 相澤 北斗
3dPrinting
Recommended by 相澤 北斗
ハードウェア
Recommended by 相澤 北斗
株式会社スマートロボティクス / エンジニア
ロボットを簡単に構成する為に製作したアクチュエータです。 アクチュエータ内部は、減速機・ブレーキ・モーター・制御回路・クロスローラーベアリングにより構成されています。 制御端末とは、電源、USB(RS485)のみ接続する事で、Pythonから制御可能になっています。