








GITAI Inc. / Robotics Hardware Engineer
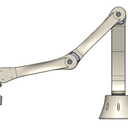
"シャクトリ虫"型ロボットアームの検証
相模原JAXA試験場にて行った、シャクトリ虫型のロボットアームの検証です。 このプロジェクトでは、月面ローバにアームが乗り移り作業を行うシーンがあるのですが、これは尺取虫アームが動き始めた頃から「ローバと合体させたら面白そうだから設計したい!」と言っていたところ、それはGITAIが見せたい世界観としても面白いという事で、実装する事になりました。 実装時はローバ担当の方と相談しながら、私はアームが使用するツールや、試験用ランダーの設計・組み立てを行いました。ツール設計もカメラから画像を認識するモーションを考えたり、既存ツールと電装系をクイックに改造して使えるように準備するなど、ロボットならではの難しさもあったのですが、そこも各担当者とクイックにやりとりし試行錯誤が出来るスキルが活きた楽しい仕事でした。 余談ですが、ランダーの重量は350kg程度あり、トラックへの積載から現場での組みばらしを楽に早く、かつ安全に組めて、安く作れるか、結構悩んだ一品です。