








株式会社スマートロボティクス / エンジニア
トマト自動収穫ロボット

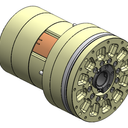
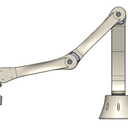
スマートロボティクスにて開発しておりました、トマトの自動収穫ロボットです。 当時の開発フェーズは2段階あり、社内実証実験、ビニールハウス実証実験でした。 社内での開発時は、開発期間が実質2か月しか無かったものの、ソフトを担当していたメンバーと、ハード・ソフトで解決出来る領域のギリギリをお互いに理解し合い、そこを解決したおかげで、失敗も含めても1個あたり平均15sで収穫できるロボットを開発しました。スマロボで開発した中でも、一番刺激的な瞬間でした(写真はこのバージョンをそのまま農園に持って行ったものです) その後、協力頂ける農家さんのハウスにて、実際の農園でトライした際、当初開発したエンドエフェクタでは、手先が大きく、葉や茎に干渉し易い事が分かりました。 その為、出来るだけ手先が細いエンドエフェクタを開発する必要があり、最終的には、収穫対象のうち一番小さいと規定したトマトの直径と同じサイズまで細くできました。 もちろん、100%成功出来る訳では無かったものの、密集したトマトの房から、ヘタを残して収穫できるエンドエフェクタは、世界でこれが初めてです。 最初の2か月で開発したエンドエフェクタの特許 https://www.j-platpat.inpit.go.jp/c1800/PU/JP-2021-058936/8635F0745F7E652ADC93BDFDC3749E0BDD412F94719506B31B3343D2BA93D522/11/ja ハウス内収穫を実現する為に開発したエンドエフェクタの特許 https://www.j-platpat.inpit.go.jp/c1800/PU/JP-2021-171020/933429CAF71E34AED269CF9617C264A089CF2AE8BA73D48A6E430BF5D1325327/11/ja