

Mobile Personal Space
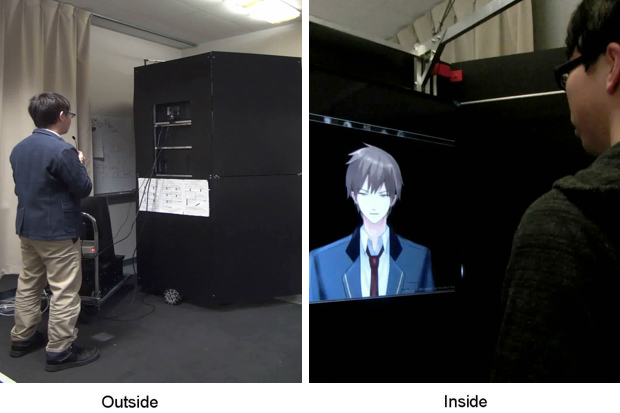
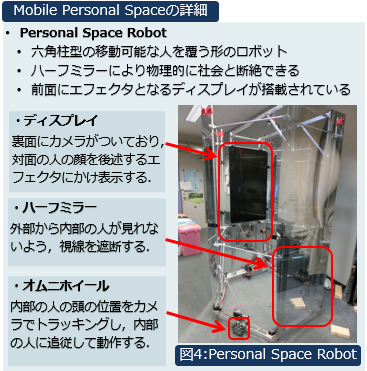
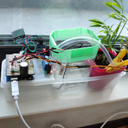
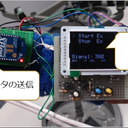
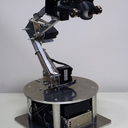
【概要】 Mobile Personal Spaceは人よりも大きな外殻をもったロボットで、六角柱の形状をしています。ロボットには三輪のオムニホイールがついており、360度自由な方向に進むことができます。 このロボットは中に人が入ることができます。中に入った人が歩くと、ロボットはそれを認知し追従します。つまり、ロボットは人の外殻となり、他の人の視線をシャットアウトするので、所謂コミュ障と呼ばれる人が人の視線を気にしなくてすみます。 外の人とコミュニケーションをとりたいときには、カメラで外の人の顔を撮影し、内側のディスプレイにキャラクターに変換して表示します。そのため、中の人は他人の顔をはっきり見なくてもすむため、視線を合わせるのが苦手な人が相手と話すときの心理的障壁が下がります。 【作成目的】 修士研究にて、視線恐怖症、対人恐怖症の人の補助のためコンセプトモデルとして、「Mobile Personal Space」を制作しました。 【工夫点】 人の位置推定の画像処理のプログラムとロボットの自己位置調整のプログラムは別のプログラムで作成しなければならなかったため、共有メモリで位置情報を別プログラムに送りました。 また、ロボットの中の人の位置推定をするため、ロボットの天井部にカメラを下向きに設置し、人の頭に赤い球と青い球のついたカチューシャをつけることで、人の向きと位置を推定しました。 【得られた知見】 オムニホイールの回転、移動、回転しながらの移動の制御方法の知見を得ました。