



個人活動 / AbudoriLab
お手軽ROSモータドライバ "Gekko"
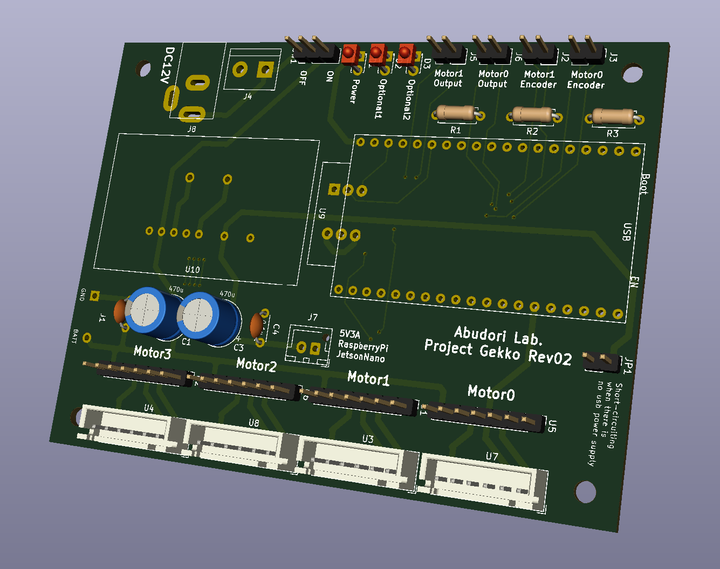
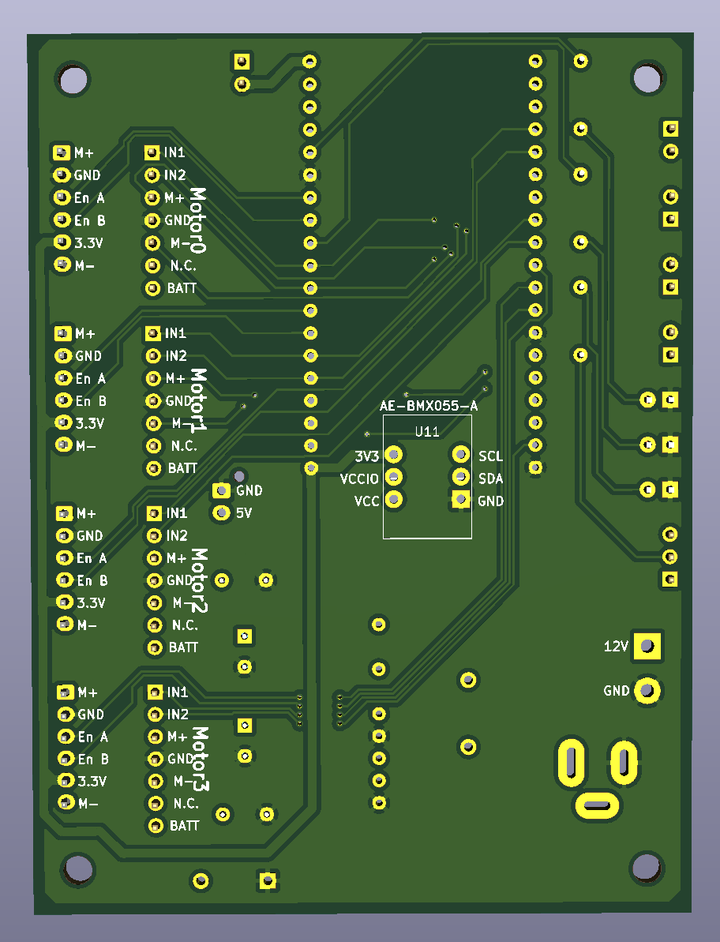
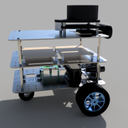
学習用自律移動ロボット"Lapin"のモータ駆動用のモータドライバ。ROS2と通信し、twistを投げると、実際の駆動量とオドメトリ を返す。オプショナルでIMUの値も出力できる(選択制)。最大4出力でき、メカナムホイールやオムニホイールロボットに対応可能。 電源は6~12V入力でDCジャックまたはターミナルで接続し任意のバッテリーやACアダプタを使用できる。次バージョンで突入電流を回避させる回路を入れ市販のモバイルバッテリーの保護機能で停止しないモデルを作成中。 5V3Aの供給能力もあり、バッテリーからGekko一つでRaspberryPiやJetsonNanoを駆動することが可能。マイコン はESP32DevKitがそのまま流用でき、ROS連携させるのもよし、単体でIoTモータ制御に使用してもよし。 初めてハンダ付けしてモータを回してもらうため、表面実装部品は使用せず、間隔もゆとりのあるものとした。何人かはんだ に慣れていない人にテスト実装してもらったが、難なくモータを回すところまでこなすことができ、実績あり。