/assets/images/7590944/original/bca0c3fe-06f7-4ca2-95a9-a9455d60c61a?1632300622)
ハードウェアエンジニア
ロボットハードウェア開発インターン募集中!
Proxima Technology(プロキシマ テクノロジー)はモデル予測制御の民主化を目指しています。
株式会社 Proxima Technology
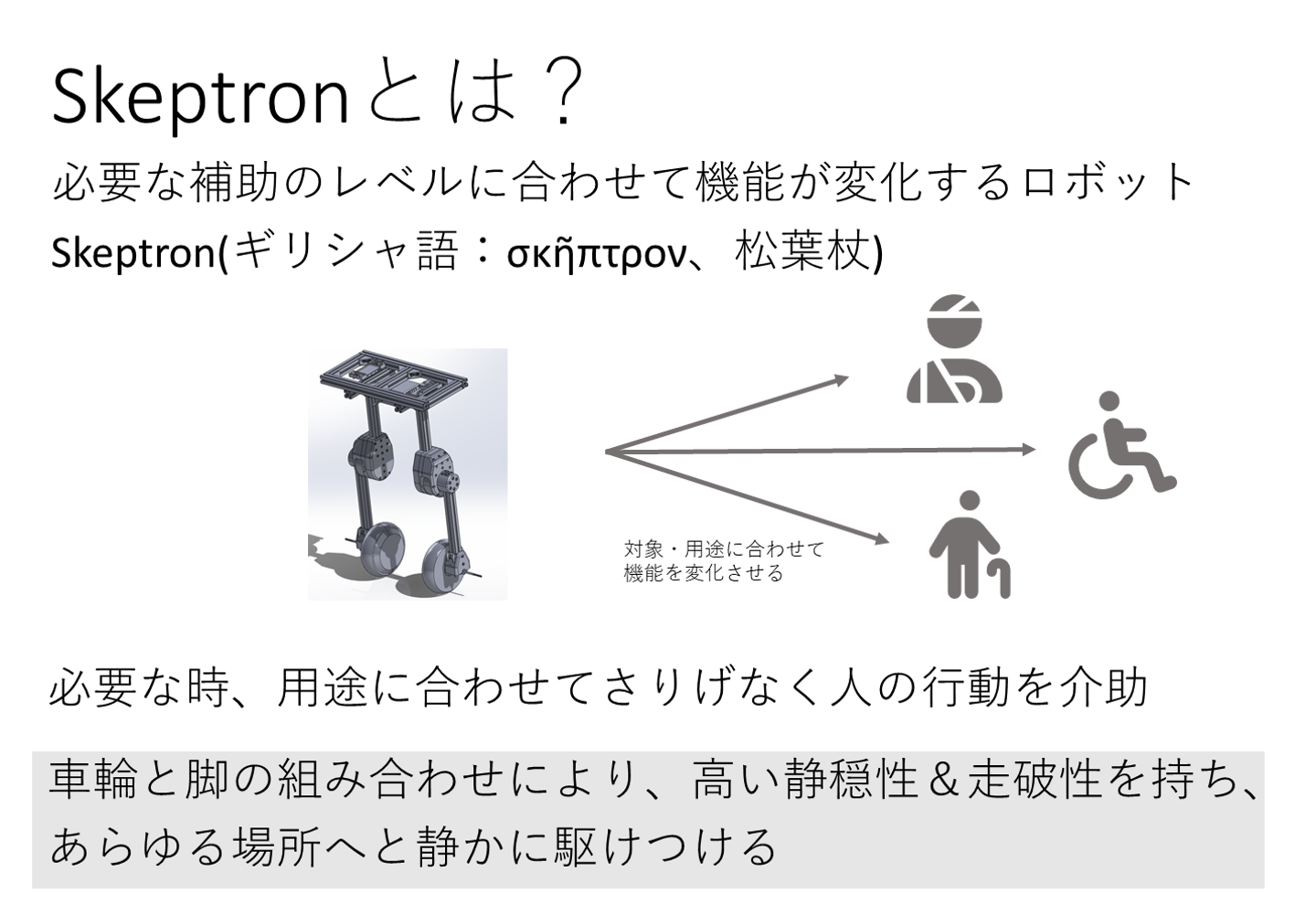
Skeptronとは?
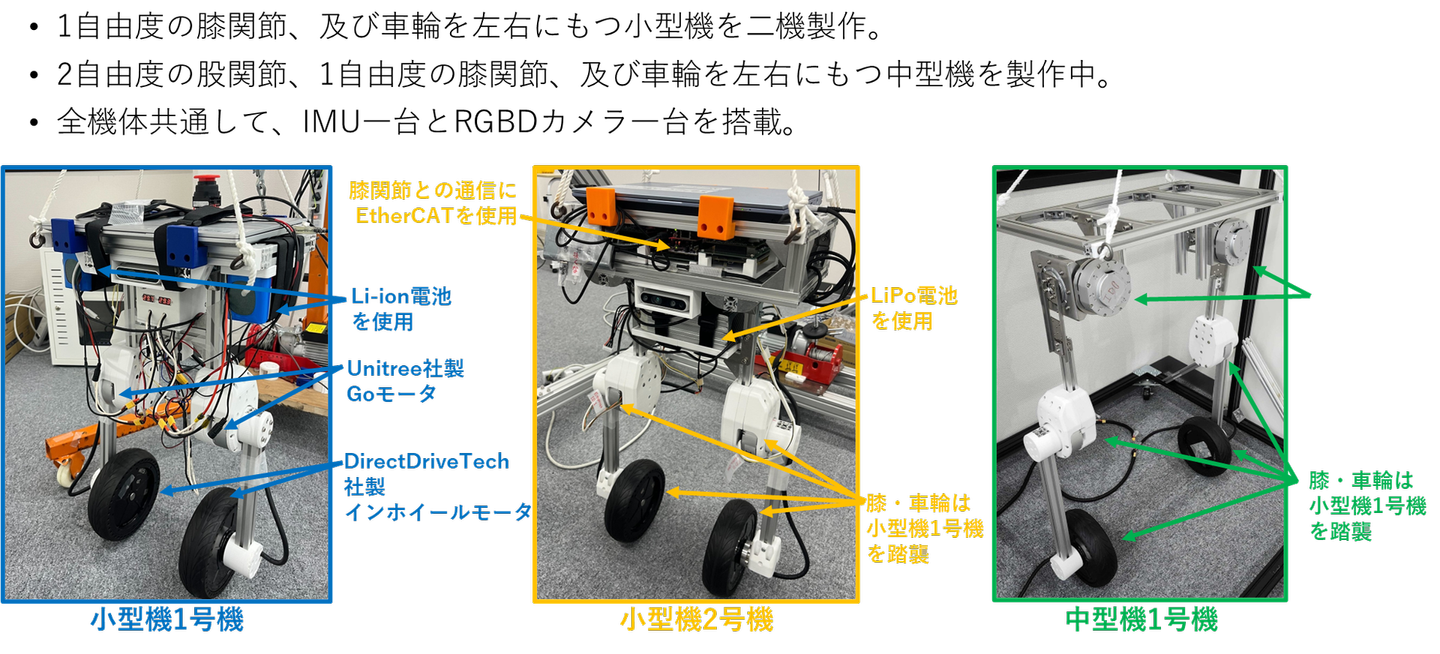
現在開発中の3種類の機体について
ハードウェア技術紹介
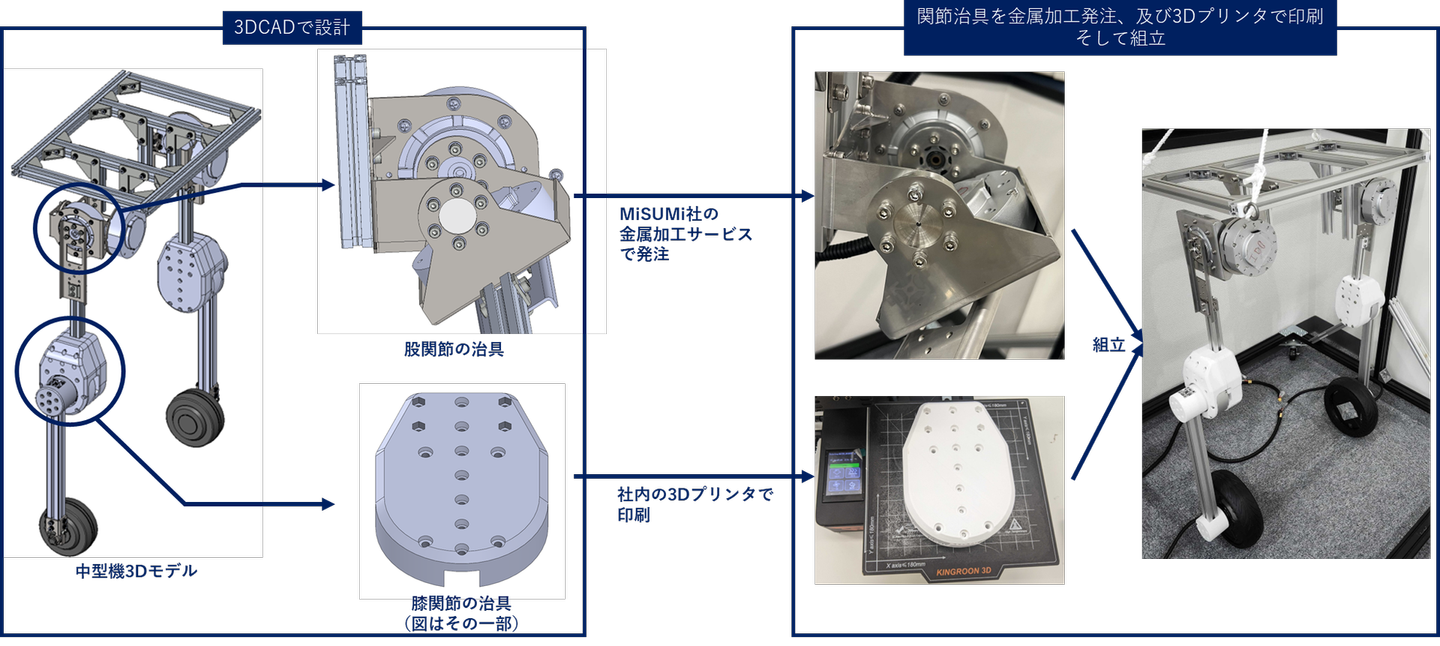
機体(メカ)設計
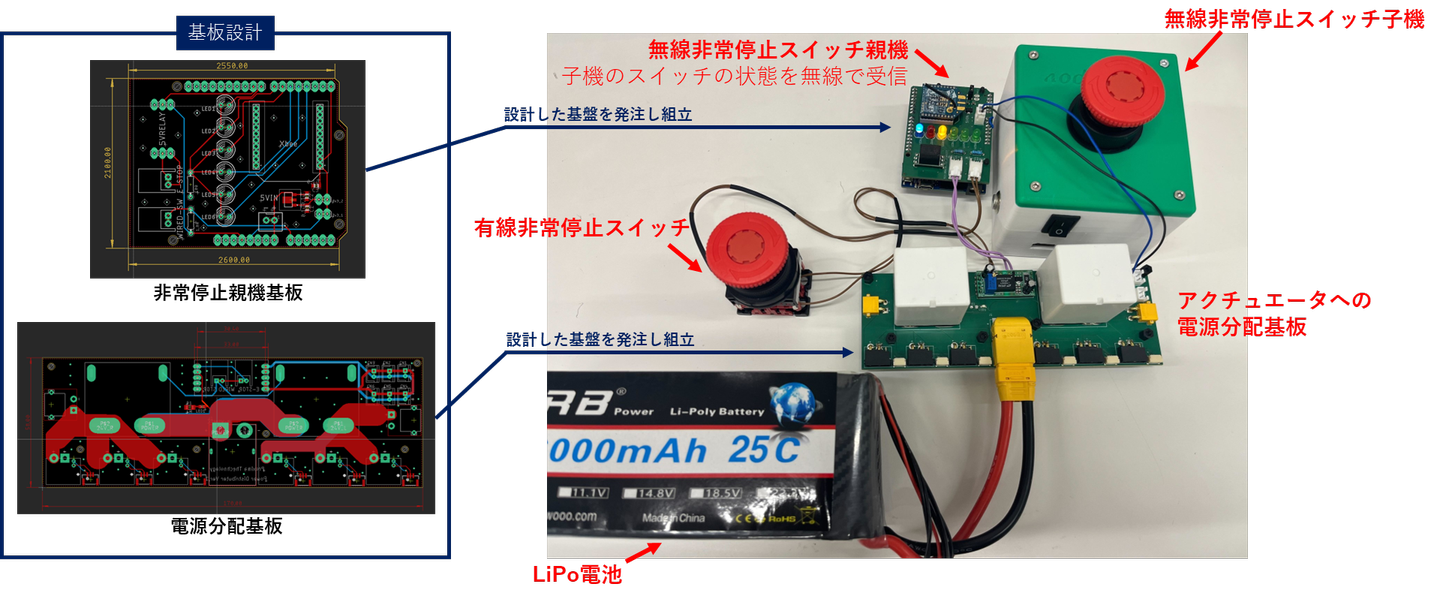
電気系(エレキ)設計
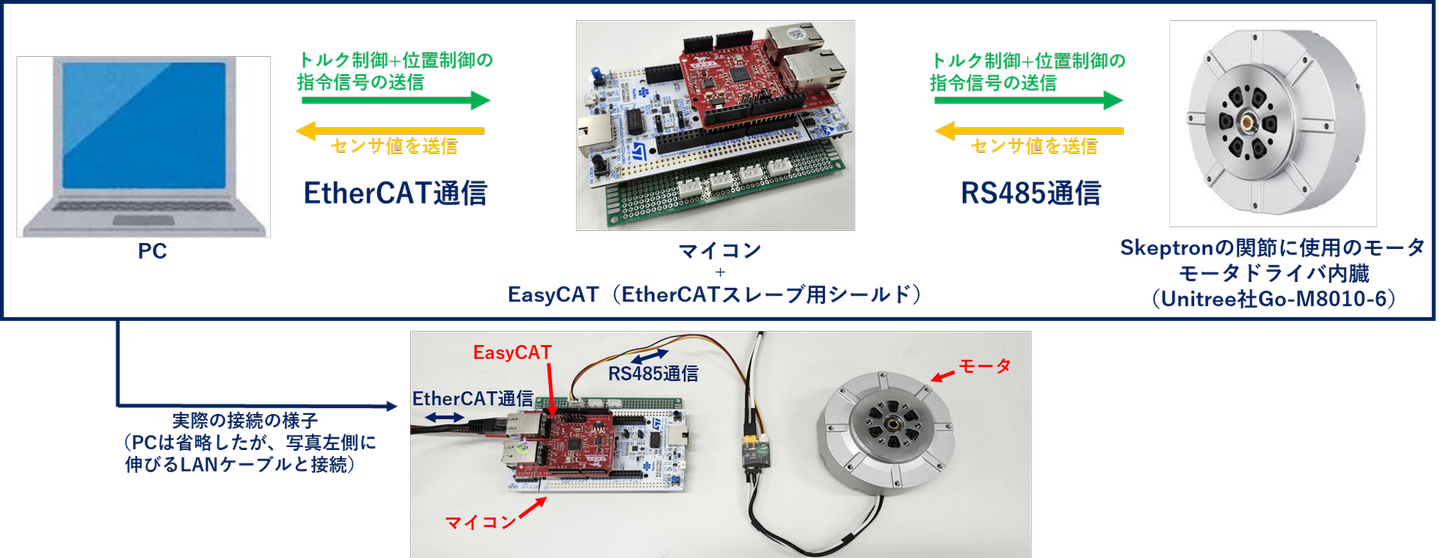
通信構成
ソフトウェア技術紹介
実機ソフトウェア・システム構成
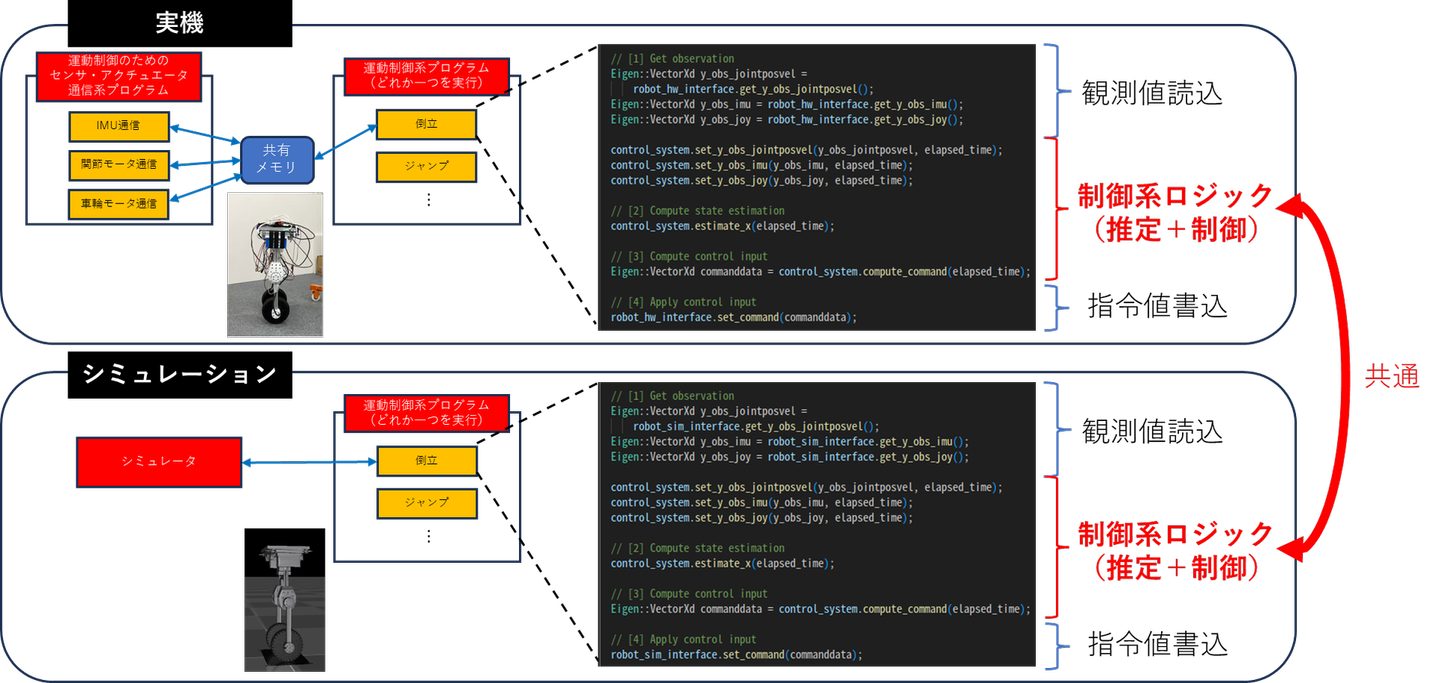
運動制御系プログラムの実機&シミュレーション動作環境
最適制御・モデル予測制御:制御系プログラム開発フロー
強化学習とSim2Realを用いた制御
認識系
一緒にSkeptronを進化させてみませんか?
皆さんからのご応募お待ちしております!
Skeptronとは、株式会社Proxima Technologyが開発している二脚の車輪付きロボットです。語源はギリシャ語で松葉杖を意味するSkeptron(σκῆπτρον)からきていて、本ロボットは要介助者の必要な補助のレベルに合わせて機能が変化し柔軟な介助機能を提供することを目的としています。
Skeptronは現在、小型機1号機、小型機2号機、中型機1号機の三種類の機体が存在しています。
小型機はそれぞれ共に車輪と膝関節のみの4自由度のロボット、中型機は車輪と膝・股関節の8自由度を持つロボットとなっています。
機体は3DCADで設計し、関節治具は金属加工発注、及び3Dプリンタ印刷で制作しています。
大電流を要するロボットの駆動にはLi-ion電池やLiPo電池などを使用しています。
非常停止システム、及びバッテリからアクチュエータへの電源分配基板も設計から行い、作成しています。
関節アクチュエータ(Unitree社製モータGO-M8010-6)と高速な通信を実現するために、EtherCAT通信を使用しています。当通信システムにより、4kHzの通信が可能になりました。
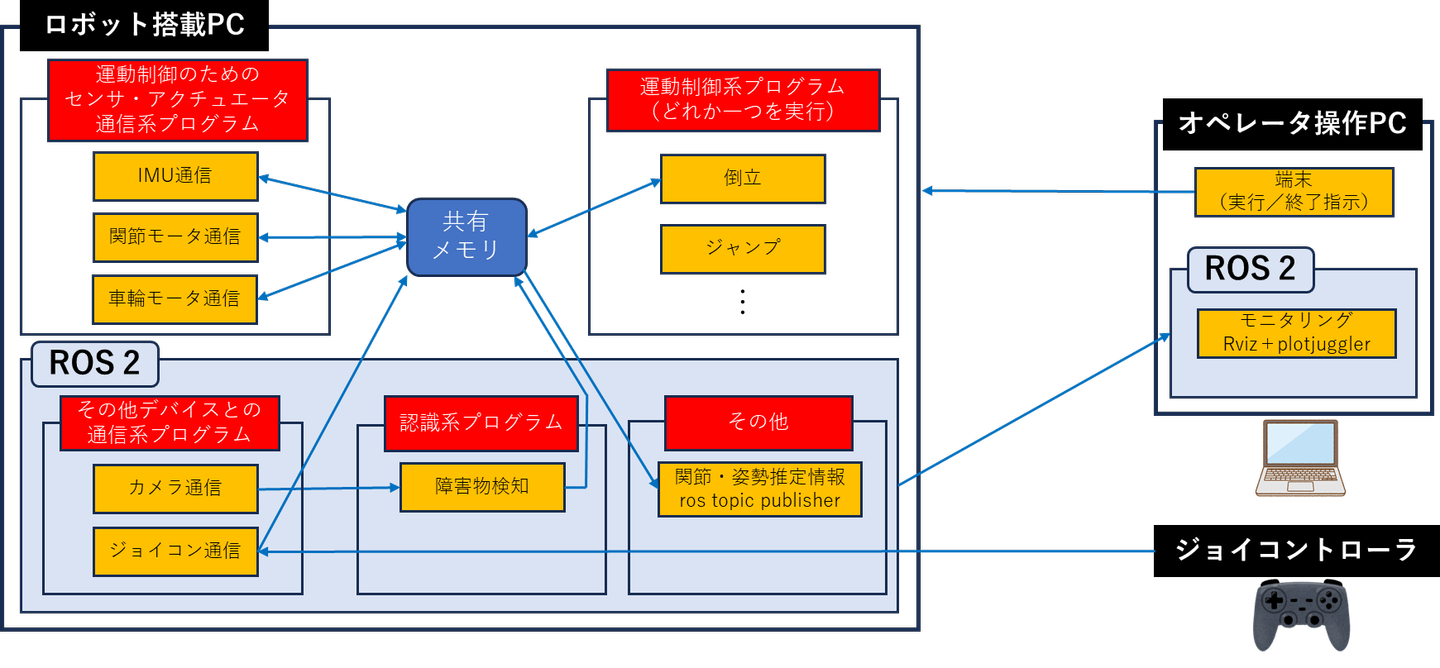
ロボット搭載PCでは、通信系・運動制御系・認識系プログラムを実行、無線接続のオペレータ操作PCでは、プログラム実行/終了指示と、ロボット状態をモニタリングしています。
速度が必要な運動制御に関するプロセス通信は共有メモリ、それ以外はROS 2を使用しています。
参考文献:「PythonとCasADiで学ぶモデル予測制御」
制御系ロジックの開発は主にPythonを用いて行っています。その中で、現代的なロボット×最適制御・モデル予測制御開発ツールとして以下のようなものを利用しています。
第一弾としては、最適制御のコスト関数・制約条件・ソルバー設定等をPythonで記述し、Python動力学シミュレータ(mujocoのpython版)上で動作検証をします。
また、実機への組み込みの際にはC++制御系プログラムの開発・シミュレーション検証に移ります。Python(CasADi)で開発した制御系ロジックからC/C++コード生成して組み込み、C++動力学シミュレータ(mujoco)上で動作検証し、その後実機でC++制御系プログラムの動作検証を行います。
Genesis等の便利な強化学習ツールの普及により、現在では弊社でも強化学習の試験的な導入を始めています。
・強化学習によるローラースケート風の動作
・強化学習による階段登り動作
・強化学習によるサッカー(フリーキック)動作
・実機での屈伸動作(Sim2Real)
ロボットにはIntel社製RealSense D435を搭載しており、当カメラを用いての障害物検知も実装しています。
当記事をご一読いただきありがとうございました!
もしこのロボット「Skeptron」に興味を持たれた方がいらっしゃったら是非弊社のロボット開発インターンにご応募ください!
/assets/images/7590944/original/bca0c3fe-06f7-4ca2-95a9-a9455d60c61a?1632300622)


![]()