
研究の進捗
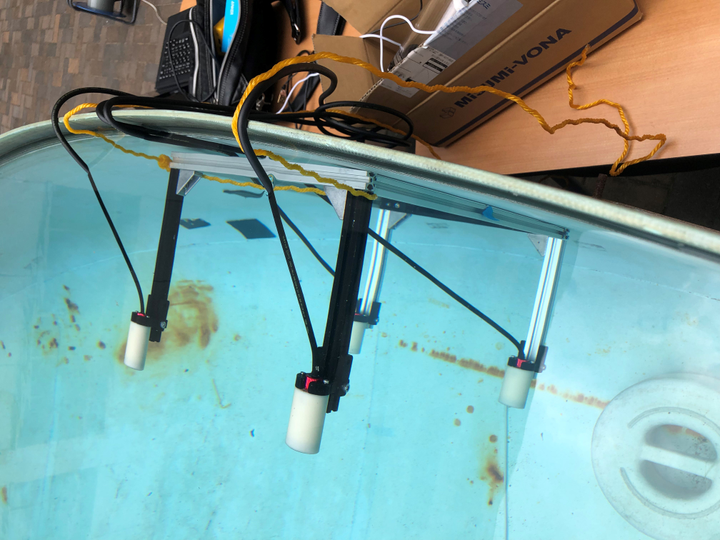
私の研究は,水中内で動いているロボットがどの位置にいて,基地局等からどの程度離れているかをリアルタイムで確認できるような独自の形状をした音響装置(ソナーのようなもの)の開発であります. 開発する装置は,水中ロボットに取り付けた音源から発せられた音を開発した装置を構成する4つの水中用のマイクが聞き取り,その時に生じるマイクごとの音源からの音の到達時間差を用いて音源である水中ロボットの方位と距離を算出するものであります. この研究の最も重要な部分は,どれだけ水中内で水中ロボットから発せられた音かを取得・解析し,リアルタイムで方位や距離を表示できるかであります.少しでも独自の水中マイクに支障があると,まったく水中内で音が取れないといったことが起こります. この装置が開発されれば,私が研究している分野に新たな道を作ることが出来ると教授や団体から期待されています.