トクイテンの森です。なかなか記事を書けなくて申し訳ありません。突発的な案件で開発リソースを取られたこともあり、収穫ロボット開発を少し遅らせたりと慌ただしい年末でした。その案件も落ち着いたので、現在は再び収穫ロボット開発に集中しています。
今回の記事はその収穫ロボット開発の進捗報告です。
これまでの経緯
株式会社トクイテンではミニトマトを吸引力により収穫するロボットの開発を2023年から開始して以下のフェーズで開発を行なってきました。
- 既存ロボットアームを用いた吸引用エンドエフェクタと収穫動作の検証(2023年6月-2024年7月)
- 自社開発の直交駆動アームとレール上での移動台車を用いた自動収穫の検証(2024年8月-2025年7月)
- 直交駆動アームとレール間移動可能な他社製農場用移動台車を統合した農場を自動巡回しながらの自動収穫の検証と運用(2025年8月-2026年1月(7月終了予定))
以下の記事は2025年7月までの進捗ですが、現在は上記第3フェーズにあたり、この記事の中にも記述している目標に取り組んでいます。
収穫ロボット開発目標を一部修正しました
以下に目標を再掲しますが、一部突発的な開発事案が発生したため目標の締め切りを後ろ倒しにしました。2026年4月からとしていた栽培メンバーへの引き継ぎは2026年5月より行いたいと考えています。
2026年3月4月での開発目標
以上の成果を踏まえて目標を設定しました。1日でベテラン収穫者1人分の収穫量をロボットにより収穫
2025年12月〜2026年3月はロボット開発チームが運用してロボット収穫して出荷
栽培担当者が運用できるインターフェースやマニュアル、研修を用意して体制を整える
2026年4月5月からの運用
栽培チームに運用を引き継ぎつつ、ロボット開発メンバーは現場で問題が起きればすぐに急行できる体制を作る
第2フェーズからの大きな変更点としては、農場の大きな通路はコンクリートの土間を敷いて凹凸のない平面としたことと、レールを農場の畝間の通路全体に敷設したことです。これにより不整地移動ロボットの自社開発をすることなく他社製移動台車の導入が容易になり、自動収穫機能の開発に集中することができました。
現在の開発状況
第2フェーズのバージョンではレールへの乗り上げは開発者が行い、レールに乗った後の移動については移動しながら自動収穫する検証を行なってきました。しかし、これでは農場全体の収穫を自動化することはできないため、開発時間の節約も兼ねて韓国のスタートアップが開発した農業用移動台車を活用して移動の自動化も進めることとしました。これによりレールからレールへの移動を行いながら、農場全体での収穫を行います。

現在の収穫ロボットの外観(足回りはメカナムホイールによる全方位台車)
![]()
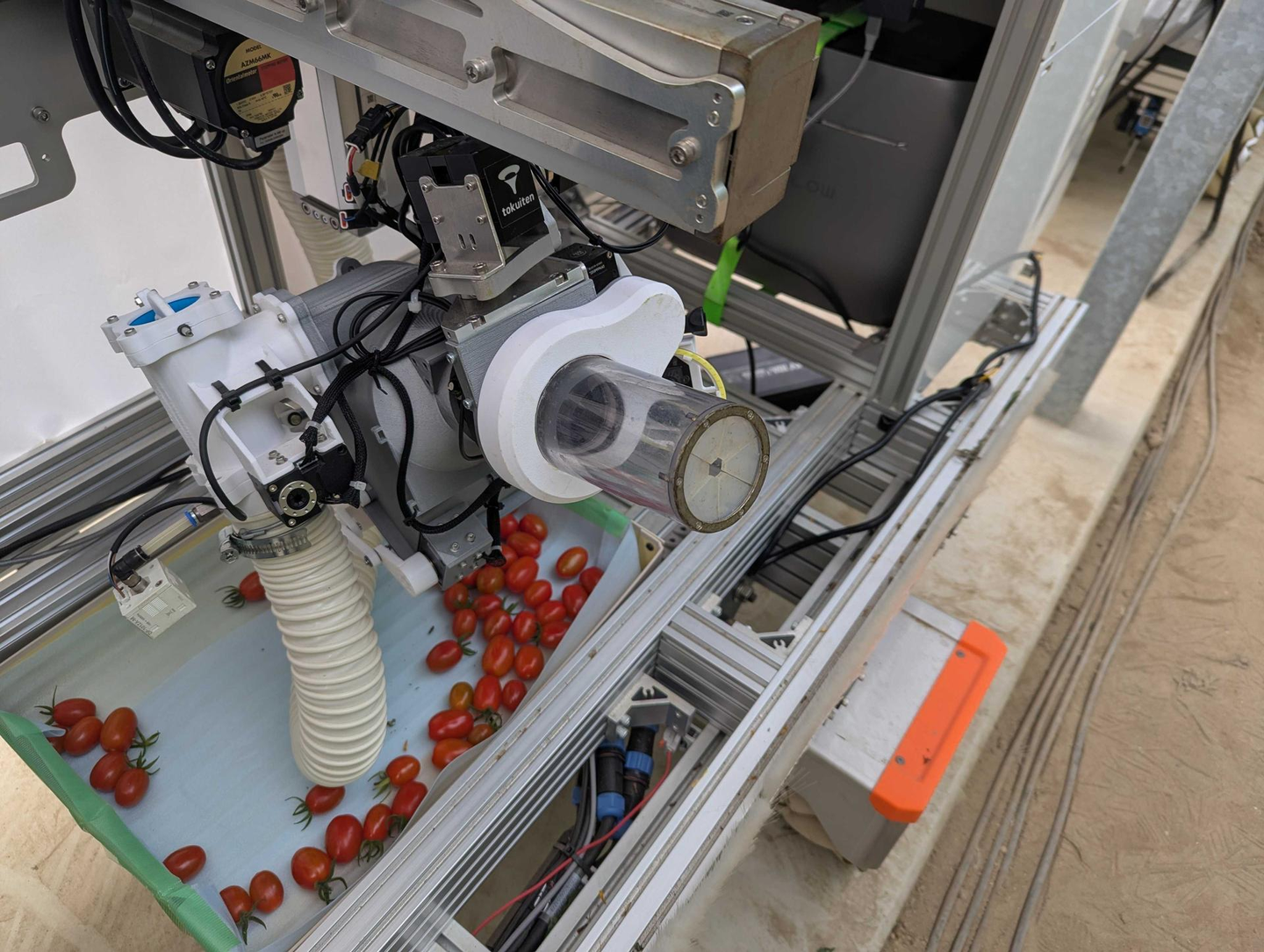
吸引を行うエンドエフェクタ
11月21日には、(1)土間からレールへの乗り移り、(2)レール上での収穫、(3)終了して引き返してレールから降りる、(4)次のレールの目前へ並行移動の一連の動作をテストしています。
今年に入って1月15日(木)に農場全体を巡回する前提の収穫テストを開始しています。
現場の課題
実をもぎ取りできていない問題
前作のテストでは見られなかったヘタが実についたまま引きちぎっている現象を解決する必要があります。この件は来週にも解決しているかもしれません。
農場内の畝間通路の中にトマトが迫り出して通れない問題
栽培との兼ね合いですが、トマトが通路に迫り出してきてロボットが通れない通路が存在しています。栽培チームとの話し合いでワイヤーを修正するなどしていますが、ロボットの形状も少し変更しなければなりません。
今後の予定
4月末の栽培チームへの引き渡しを目標として、毎週2回のテストを繰り返す予定です。その中で、栽培チームと議論しながら効率的な運用方法についても詰めていきます。

/assets/images/22961463/original/c6264ff4-1126-4261-b5a0-a9553bb18bf1?1769218733)

/assets/images/16831432/original/2c763126-ee2f-4f97-a460-eeee8a754b10?1706463298)

/assets/images/16831432/original/2c763126-ee2f-4f97-a460-eeee8a754b10?1706463298)


