
針穴への糸通し
最近、裁縫していますか?
私は小学校5年生のときの家庭科で買ってもらった裁縫セット(なんかドラゴンの模様が描いてあるやつ)を今も使っています。
それはそうと、針の穴に糸を通すのはとても精度が求められる作業です。
糸は柔軟性があるため、押し込むとヘナっと曲がってしまいます。
つまり力覚センサなどの接触ベースのセンシングでは検知できません。
また、針の穴と糸のクリアランス(公差)は非常に小さいため、ギリギリの制御が求められるわけです。
システム構成・本機特長
キャスター付き台座の載せたロボットアームと、針山(懐かしい)、針、赤い糸、キャリブレーションされていないwebカメラを2台用意します。糸の色はお好みで選んでもらって結構です。
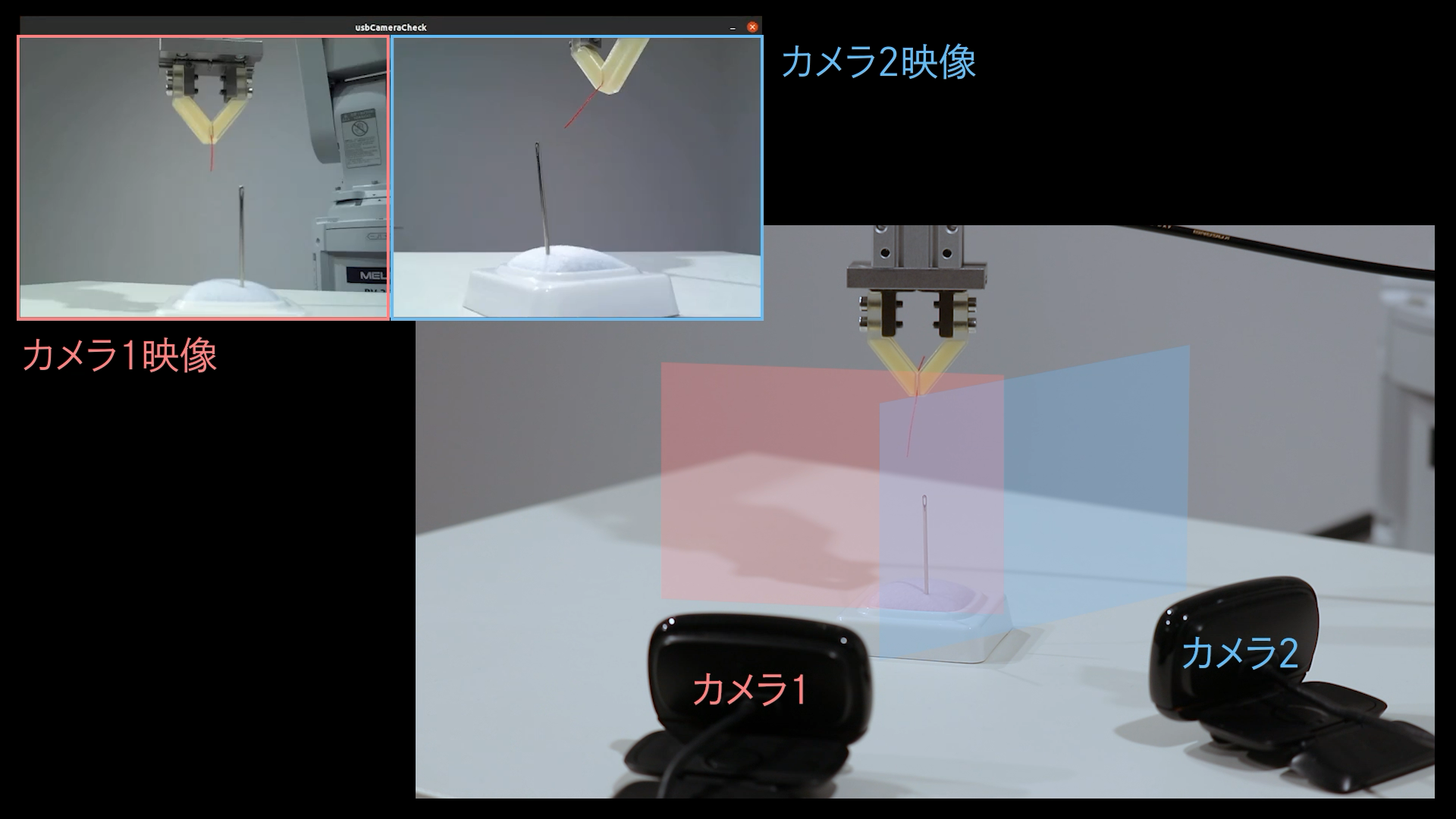
カメラは針と糸が画角に収まるように置いてもらえばOKです。
動画のなかでは、針穴と糸の先端をマウスでクリックしています。これはわかりやすいかと思ってしています。
あとはcrewbo studioが自動的にロボットアームの軌道を制御して、針穴に糸を通してくれます。
糸は柔軟であるため、持つと震えます(振動する)。この振動自体もカメラからの情報に基づいてフィードバックして制御することで、カメラだけの制御で高精度な動作を実現しています。
補足
従来の産業用ロボットアプリケーションや、FAビジョンシステムでは実現が困難だった、高精度な制御アプリケーションを、チトセロボティクスのcrewbo studioならすぐに実装することができます。
ロボットアプリケーション開発の楽しさ、奥深さに触れてみたいエンジニアのみなさんからのご応募をお待ちしております。
/assets/images/16837873/original/602a2ae2-ef7c-41fb-88af-49e61f129298?1706506561)


/assets/images/16837873/original/602a2ae2-ef7c-41fb-88af-49e61f129298?1706506561)


/assets/images/16837873/original/602a2ae2-ef7c-41fb-88af-49e61f129298?1706506561)


