Discover companies you will love


Mid-career
Mid-career
Tomoya SATO
1994年生まれ、広島県広島市出身。 学部3年生から情報科学を専攻。学部と修士課程では3次元点群スキャンマッチングやGPU並列化、自動運転の分散処理について研究。2017年よりマップフォーにて3次元点群地図作成ソフトウェアの開発に参加。
Keisuke URASAKI
鈴木 琢朗
SEAMS and AutowareDevelopment部 サブリーダー
株式会社マップフォー's members
1994年生まれ、広島県広島市出身。
学部3年生から情報科学を専攻。学部と修士課程では3次元点群スキャンマッチングやGPU並列化、自動運転の分散処理について研究。2017年よりマップフォーにて3次元点群地図作成ソフトウェアの開発に参加。
What we do
マップフォーは自動運転システムのための空間情報・位置推定技術を社会実装する目的で2016年9月に設立されました。2022年7月にパーセプションエンジンと事業統合し、センシング・パーセプション技術とマッピング・ローカライゼーション技術とのシナジーを加速させ、自動運転領域だけでなく、地図や測量、インフラ保全、屋内外における空間情報の応用など、当社の技術は、あらゆる産業において、活用され始めております。
私たちの4つのコア技術「MAPPING」「SENSING」「LOCALIZATION」「PERCEPTION」の総称を空間知能と名付けました。空間知能とは実世界のあらゆる空間をセンシングし、マッピングを通してさまざまなシステムに必要な情報を構造化する技術です。
空間知能技術により
- 空間情報・位置推定
- 環境認識
- 自動運転システムの開発・実装
これらの3つのソリューションを提供しています。
◆空間情報・位置推定
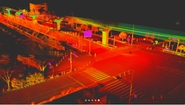
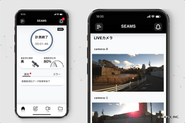
自動運転に不可欠な空間情報を作成するソフトウェアや、データ計測システム「SEAMS(シームス)」を提供しています。独自アルゴリズムにより、高価なセンサを用いることなく、高精度な空間情報を短時間で作成することを可能とし、自己位置推定では、LiDAR、GNSS/IMU、カメラ等、複数の手法を開発しています。条件の異なる様々なフィールドに最適なソリューションや、位置推定精度・信頼性に関する体系的なアセスメントを提供しています。
◆環境認識
障害物検知を行うための物体認識ソリューションを提供しており、独自開発のアルゴリズムを実装したソフトウェアで、高精度かつリアルタイムな物体認識を可能とします。LiDAR、カメラ、Radar等のマルチセンサーに対応することで、条件の異なる様々な環境に合わせた最適なセンサー構成を提供しています。
◆自動運転システムの開発・実装
Autowareを用いた自動運転車両構築、走行環境に合わせた車両適合、シミュレーターを活用したシナリオ評価、現地オペレータ対応等、自動運転システムの開発における幅広いソリューションを提供しています。




What we do
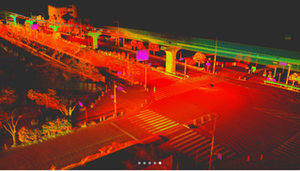
3次元点群画像
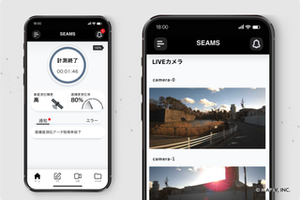
空間情報計測システム
マップフォーは自動運転システムのための空間情報・位置推定技術を社会実装する目的で2016年9月に設立されました。2022年7月にパーセプションエンジンと事業統合し、センシング・パーセプション技術とマッピング・ローカライゼーション技術とのシナジーを加速させ、自動運転領域だけでなく、地図や測量、インフラ保全、屋内外における空間情報の応用など、当社の技術は、あらゆる産業において、活用され始めております。
私たちの4つのコア技術「MAPPING」「SENSING」「LOCALIZATION」「PERCEPTION」の総称を空間知能と名付けました。空間知能とは実世界のあらゆる空間をセンシングし、マッピングを通してさまざまなシステムに必要な情報を構造化する技術です。
空間知能技術により
- 空間情報・位置推定
- 環境認識
- 自動運転システムの開発・実装
これらの3つのソリューションを提供しています。
◆空間情報・位置推定
自動運転に不可欠な空間情報を作成するソフトウェアや、データ計測システム「SEAMS(シームス)」を提供しています。独自アルゴリズムにより、高価なセンサを用いることなく、高精度な空間情報を短時間で作成することを可能とし、自己位置推定では、LiDAR、GNSS/IMU、カメラ等、複数の手法を開発しています。条件の異なる様々なフィールドに最適なソリューションや、位置推定精度・信頼性に関する体系的なアセスメントを提供しています。
◆環境認識
障害物検知を行うための物体認識ソリューションを提供しており、独自開発のアルゴリズムを実装したソフトウェアで、高精度かつリアルタイムな物体認識を可能とします。LiDAR、カメラ、Radar等のマルチセンサーに対応することで、条件の異なる様々な環境に合わせた最適なセンサー構成を提供しています。
◆自動運転システムの開発・実装
Autowareを用いた自動運転車両構築、走行環境に合わせた車両適合、シミュレーターを活用したシナリオ評価、現地オペレータ対応等、自動運転システムの開発における幅広いソリューションを提供しています。
Why we do


私たちは、ビジョン・ミッションの実現に向けて、以下のバリューを大切にしています。
ビジョン:社会の変革と創造へ、技術で導く
ミッション:あらゆる産業に不可欠な空間知能を追求する
「空間知能」こそ私たちの持つユニークな技術であり、これを使って、どのように実世界の課題を解決するのか、どの方向に向かうべきかを指し示す社会の地図として、導く存在でありたいと考えています。
マップフォーはプロフェッショナルな技術者集団として、「空間知能」領域で世界一の会社を目指していきます。この「空間知能」を絶えず発展させていくとともに、産業の垣根を越えて新たな価値を創造します。
How we do


私たちは3つのバリューを掲げています。
- Think Forward - 未来志向
- Focus your Passion - 情熱
- Teamwork Empowerment - チームワーク
- Think Forward - 未来志向
私たち一人ひとりが高い視座を持ち、絶えず新たな知識や技術の習得に励みます。
世界と未来を見据え、制約にとらわれない革新的なアイデアとアプローチを探求し続けます。
We constantly learn, innovate, and seek new technologies to overcome future challenges.
- Focus your Passion - 情熱
私たちの共通の使命に真摯に向き合い、挑戦を恐れず主体的に行動します。
解決が難しい複雑な課題にも立ち向かい、最後まで強い意志を持ってやり抜きます。
As a team, we share a joint mission and take proactive action. We tackle complex issues with determination and carry them through to the end.
- Teamwork Empowerment - チームワーク
私たちは建設的なコミュニケーションと助け合いを重視し、互いに尊敬・信頼し合えるチームを作ります。
個々の異なるスキルや専門知識を結集し、チームとしてより大きな力を発揮します。
We foster a culture of respect and trust through constructive communication and mutual assistance, leveraging our unique skills and expertise to achieve greater strength as a team.
私たちは、このビジョン・ミッションの実現に向けて、バリューを体現し、情熱をもって、ともに、取り組むメンバーを募集しています。
As a new team member
■マップフォーとは
当社は自動運転システムにおける3次元データ作成技術・位置推定技術を社会実装するディープテックです。
私たちの技術の原点は、自動運転分野の要素技術研究、自動運転ソフトウェアの開発、そして設立当初から積極的に携わってきた多くのパートナーとの共同研究や実証実験にあります。
これらの実績や経験から、膨大な3次元データ、ユーザーからのニーズ、ビジネスの知見を得ることで、業界最先端のテクノロジーを創出するとともに、技術精度をより高め、多様な現場環境・条件に適用できるプロダクトやソリューションの開発を進めています。
■仕事内容
(雇入れ直後)
測量コンサルタント企業と共同で、自律移動ロボットの開発に携わっていただきます。
具体的には、以下の業務をお任せします。
<具体的な仕事内容>
■ロボットの設計・開発:センサー、制御システム、AI技術を統合し、実用的な自律移動ロボットを設計・開発します。
■ソフトウェア開発:ロボットの経路計画、障害物回避、自己位置推定など、自律移動に必要なアルゴリズムを実装・改善します。
■実証実験・評価:開発したロボットを実際の環境でテストし、性能評価と課題抽出を行います。
■共同プロジェクトの推進:パートナー企業の担当者と連携し、プロジェクトを円滑に進めます。
<やりがい>
■社会貢献性の高いプロジェクト
最新の技術を駆使して、測量やインフラ点検など、社会の安全や効率化に貢献するロボットを開発できます。
■スキルアップ
最先端のロボティクス技術、AI、ソフトウェア開発の知識を習得し、エンジニアとしての専門性を高めることができます。
■チーム開発
専門性の高いチームメンバーやパートナー企業と協力しながら、大きな達成感を味わえます。
(変更の範囲)会社の定める業務
■配属部署
SEAMS and Autoware Development
■募集背景
さらなる事業拡大のため増員です。
【勤務地】
愛知県名古屋市中区錦2-8-1 I-FOREST名古屋伏見 5階
名古屋市営地下鉄鶴舞線「丸の内駅」徒歩3分
名古屋市営地下鉄鶴舞線「伏見駅」徒歩4分
(変更の範囲)会社の定める場所
【勤務時間】
フレックスタイム制
フレキシブルタイム:5:00-22:00
所定労働時間:8時間/日
0 recommendations
More from 株式会社マップフォー
- Engineering
マップフォーの新卒エンジニアを募集!
- Sales / Business Development
東京/品川DXコンサルタント 新たな技術の社会実装に挑み続ける仲間を募集
- Engineering
名古屋/空間認識・計測技術を活用した次世代3D地図エンジニア募集
0 recommendations
What happens after you apply?
- ApplyClick "Want to Visit"
- Wait for a reply
- Set a date
- Meet up
Job Post Features
Online interviews OK
Company info